[미리안 브리핑] 접근이 어려운 뇌종양 제거를 돕는 로봇
이 기술은 외과 의사가 수술 중에 뇌 깊숙한 곳을 볼 수 있게 하는 영상 기법과 조직 제거 정밀도가 향상된 로봇 시스템을 결합한다.
고도 원발성 뇌종양(high grade primary brain cancer)인 교묘세포종(glioblastomas)을 가진 환자의 평균 생존율은 2년 미만이다. 이렇게 낮은 생존율을 유발하는 요인 가운데 하나는 심부에 위치한 많은 침투성 종양이 현재의 신경외과 도구 및 영상 기술로 완전하게 접근할 수 없으며, 심지어 볼 수도 없는 것이다.
그러나 수 년 전에 미국 메릴랜드 대 볼티모어 캠퍼스(University of Maryland, Baltimore) 의과대학 신경외과 교수인 마크 시마드(J. Marc Simard)는 이 문제를 해결할 수 있는 통찰력을 가지고 있었다. 그 당시 그는 성형외과 의사가 환자의 손상되거나 죽은 조직을 제거하기 위하여 살균 구더기를 이용하는 텔레비전 프로그램을 보고 있었다.
마크 시마드 교수는 "여기서 당신은 좋은 것과 나쁜 것을 인식하는 자연의 시스템을 가졌다. 즉, 살균 구더기는 모든 나쁜 조직을 제거하고 모든 좋은 조직만을 남겼으며, 이들은 정말 크기가 작았다. 만약 뇌종양을 제거하기 위하여 살균 구더기와 동등한 것을 가지게 된다면 이것은 분명히 야구의 홈런과 같은 것이 될 것이라고 생각했다"고 말했다.
마크 시마드 교수는 같은 메릴랜드 대 볼티모어 캠퍼스에서 진단 방사선 및 핵의학 교수인 라오 굴라팔리(Rao Gullapalli), 메릴랜드 대 칼리지파크 캠퍼스(University of Maryland, College Park) 기계공학과 교수인 제이데브 데사이(Jaydev Desai)와 함께 심부에 위치한 뇌종양을 제거하는데 사용될 수 있는 작은 신경외과 로봇을 개발하고 있다.
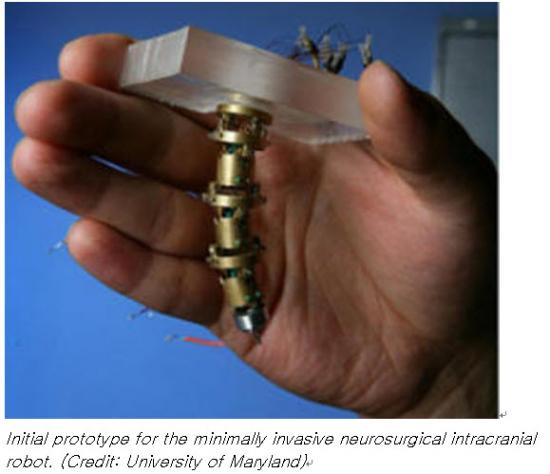
4년 만에 연구진은 최초의 시제품 로봇을 설계하고, 만들고, 시험하였다. 이 시제품 로봇은 여러 개의 관절을 가지는 손가락과 같은 장치로, 여러 방향으로 이동할 수 있다. 이 로봇의 끝단에는 전기를 이용하여 종양을 가열하고 궁극적으로 파괴시키는 전기 소작 도구(eletrocautery tool)와 파편을 제거하기 위한 흡입관이 장착되어 있다.
시마드 교수는 "목표는 소형이지만, 외과 의사가 일반적으로 수행하는 모든 작업을 수행할 수 있는 장치를 가지는 것이다. 이 작은 로봇 장치가 실현되면 종양 내부에 배치되고, 그 내부를 돌아다니면서 병에 걸린 조직의 조각들을 제거할 수 있을 것"이라고 말했다.
연구진이 개발하고 있는 로봇의 핵심 구성요소는 환자에 대한 자기공명영상법(MRI: magnetic resonance imaging)이 진행되는 동안 사용 가능하게 만드는 것이다. 시각을 지속적으로 갱신되는 자기공명영상으로 대체하여 외과 의사는 뇌에 큰 절개를 만들 필요 없이 심부에 위치한 종양을 시각화하고 로봇의 움직임을 감시할 수 있다.
연속적인 자기공명영상법으로 뇌를 볼 수 있는 능력은 절개 크기를 줄일 뿐만 아니라, 외과 의사가 수술 중에 종양의 경계를 계속 추적할 수 있게 만든다고 마크 시마드 교수가 전했다.
시마드 교수는 "전통적인 방식으로 수술할 때, 우리는 수술을 하기 전에 환자의 자기공명영상을 얻고, 환자의 뇌 내부에서 우리가 어디에 위치하는지 알기 위하여 두피나 두개골의 일부에 부착될 수 있는 표식을 이용한다. 그러나 외과 의사가 그곳에 가서 종양을 제거하기 시작할 때 조직은 움직여서 이전에 잘 정의되었던 경계가 더 이상 그곳에 존재하지 않는다. 이 경우 다시 한 번 정상적인 뇌 조직과 종양을 구별해야 할 필요성에 직면한다. 이것을 외과 의사가 직접적인 시력에 의존하여 수행하기에는 매우 어렵다. 그러나 종양과 종양이 아닌 것을 구별할 수 있는 능력을 가지는 자기공명영상법을 계속 이용할 수 있는 것은 훨씬 더 강력한 것이 된다"고 말했다.
뇌 종양 제거 수술 중에 실시간으로 자기공명영상법에 의해 안내되는 것은 엄청난 장점이 될 것이라고 미 국립 생의학 영상 및 생체공학 연구소(NIBIB)에서 프로그램 책임자로 있는 스티브 크로스닉(Steve Krosnick)이 전했다. 수술 전의 자기공명영상이나 간헐적인 자기공명영상은 수술 중에 중단되는 것을 요구하나, 수술 중 실시간 자기공명영상은 수술이 진행되는 동안 뇌의 이동을 설명하고 정상적인 조직과 종양을 신속하게 묘사하도록 한다고 스티브 크로스닉이 부언했다.
그러나 자기공명영상 장치 내부에서 사용될 수 있는 신경외과 장치를 설계하는 것은 쉬운 일이 아니다. 우선 고려해야 할 문제 중 하나는 외과 의사가 뇌에 접근하는 것으로, 자기공명영상 장치로 뇌를 촬영하는 동안 환자는 이 장치의 터널 깊숙한 내부에 위치하며, 외과 의사의 손이 어떻게 뇌에 접근할 수 있겠는가가 큰 문제가 된다고 라오 굴라팔리 교수가 전했다.
연구진의 해법은 뇌에 직접 접근할 필요성을 피하기 위해 외과의사가 로봇을 제어하도록 만드는 것이었다. 즉, 환자가 자기공명영상 장치 외부에 있을 때 외과 의사가 로봇을 뇌에 삽입하고, 환자가 자기공명영상 장치 내부로 옮겨졌을 때 외과 의사는 다른 방에 앉아 모니터 상에 뇌의 자기공명영상을 보면서 로봇을 뇌의 심부로 이동시켜 종양을 전기로 작게 조각내고 파편을 흡인하는 것이다.
이 프로젝트의 가장 어려운 부분은 자기공명영상 장치 내부의 자기장에서 제어될 수 있는 로봇을 설계하는 것이라고 기계공학자인 제이데브 데사이 교수가 전했다. 종종 로봇은 전자기 모터를 통하여 제어되지만, 이것은 선택 가능한 것이 아니었다. 자기장 내에서 전자기 모터는 심각한 이미지 왜곡을 만들어 외과의사가 시술하는 것을 불가능하게 만든다. 유압 시스템과 같은 다른 잠재적인 구조는 유체 누출에 대한 우려로 고려될 수 없었다.
대신에 제이데브 데사이 교수는 로봇의 동작을 제어하기 위하여 온도 변화에 따라 그 모양을 변경하는 물질인 형상 기억 합금(SMA: shape memory alloy)을 이용하기로 결정했다. 메릴랜드 대 칼리지파크 캠퍼스에 위치한 로봇 자동화 의료 시스템(RAMS: Robotics, Automation, and Medical Systems) 연구실에 있는 제이데브 데사이 교수 연구진은 가장 최근에 만들어진 시제품을 케이블, 풀리, 형상기억합금 스프링을 이용하여 제작하였다. 이 케이블과 풀리 시스템은 이전에 만들었던 시제품이 일부 이미지 왜곡을 일으켰던 것을 개선한 것이다.
미 국립 생의학 영상 및 생체공학 연구소(NIBIB)의 지속적인 자금 지원으로 제이데브 데사이 교수 연구진은 이제 이미지 왜곡을 더 줄이고, 인간 시체뿐만 아니라 돼지를 이용하여 장치의 안정성과 효능을 시험하는 연구를 수행하고 있다.
비록 이 장치가 수술실에서 사용되려면 몇 년이 더 걸리지 모르지만, 마크 시마드 교수는 미래의 가능성에 흥분하고 있다. 신경외과 의사가 자기공명영상의 도움을 받아 지시하는 동안 소형 기계나 로봇이 사람의 머리 내부에서 돌아다니는 수준까지 뇌수술을 진전시키는 것은 대부분 사람들이 꿈꾸는 것 이상의 흥미진진한 것이라고 마크 시마드 교수가 전했다.
출처 : http://www.sciencedaily.com/releases/2013/09/30905101723.htm
[알립니다] 이 기사는 한국과학기술정보연구원(KISTI)이 운영하는 미래기술정보 포털 미리안(http://mirian.kisti.re.kr)에 게재된 글을 전재한 것입니다. 본지는 KISTI와 미리안 홈페이지 내 GTB(Global Trends Briefing 글로벌동향브리핑) 컨텐츠 이용에 관한 계약을 맺었습니다.